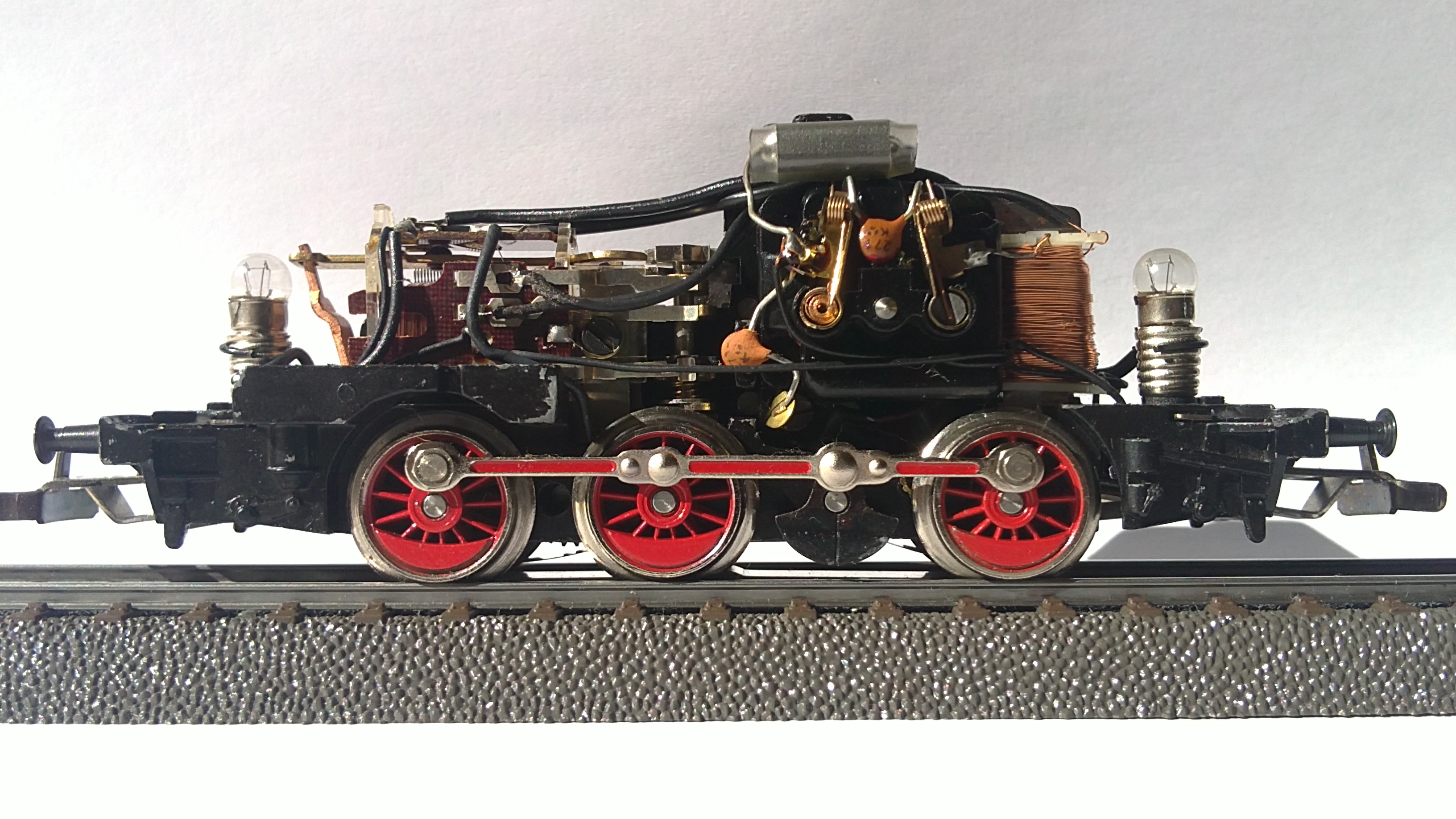
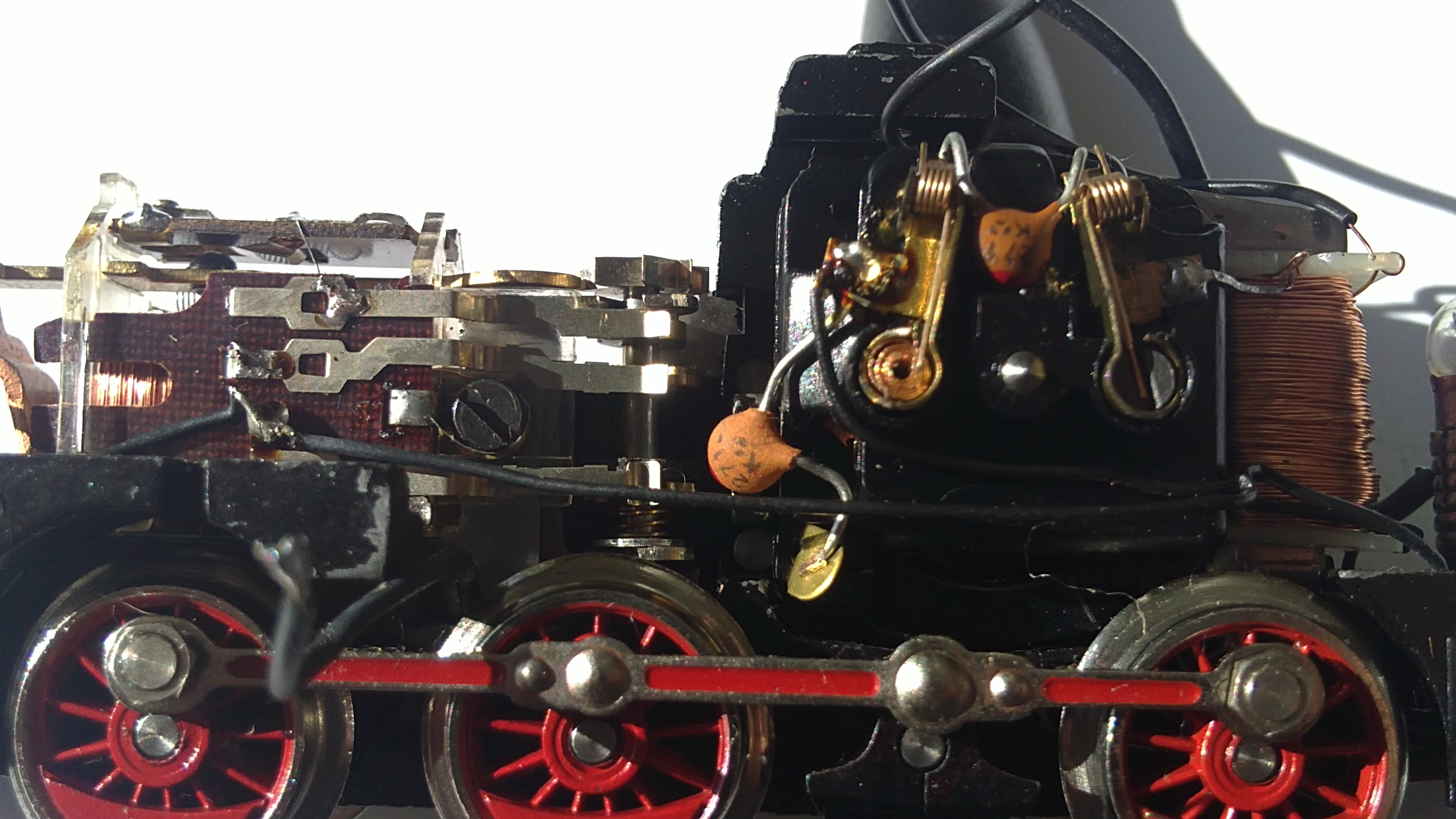
CONVERSION OF THE MÄRKLIN LOCO 3065 TO DIGITAL The items used for the conversion are: A new five pole high performance motor, and a decoder from ESU typ LokPilot V4.0. Functions programmed as follows: F0: Lights on/off, F1: Telex coupler loco end 1, F2: Telexcoupler loco end 2, F3: Shuntig mode/speed. F4: Acceleration/Deacceleration. The first step is to remove cover from the chassie. This is done by removing the screw from the top of roofcover, and pulling the cover carefully from the chassie. Picture shows the original installation with 3-pole motor and direction-relay.
Close up picture on the original installation.
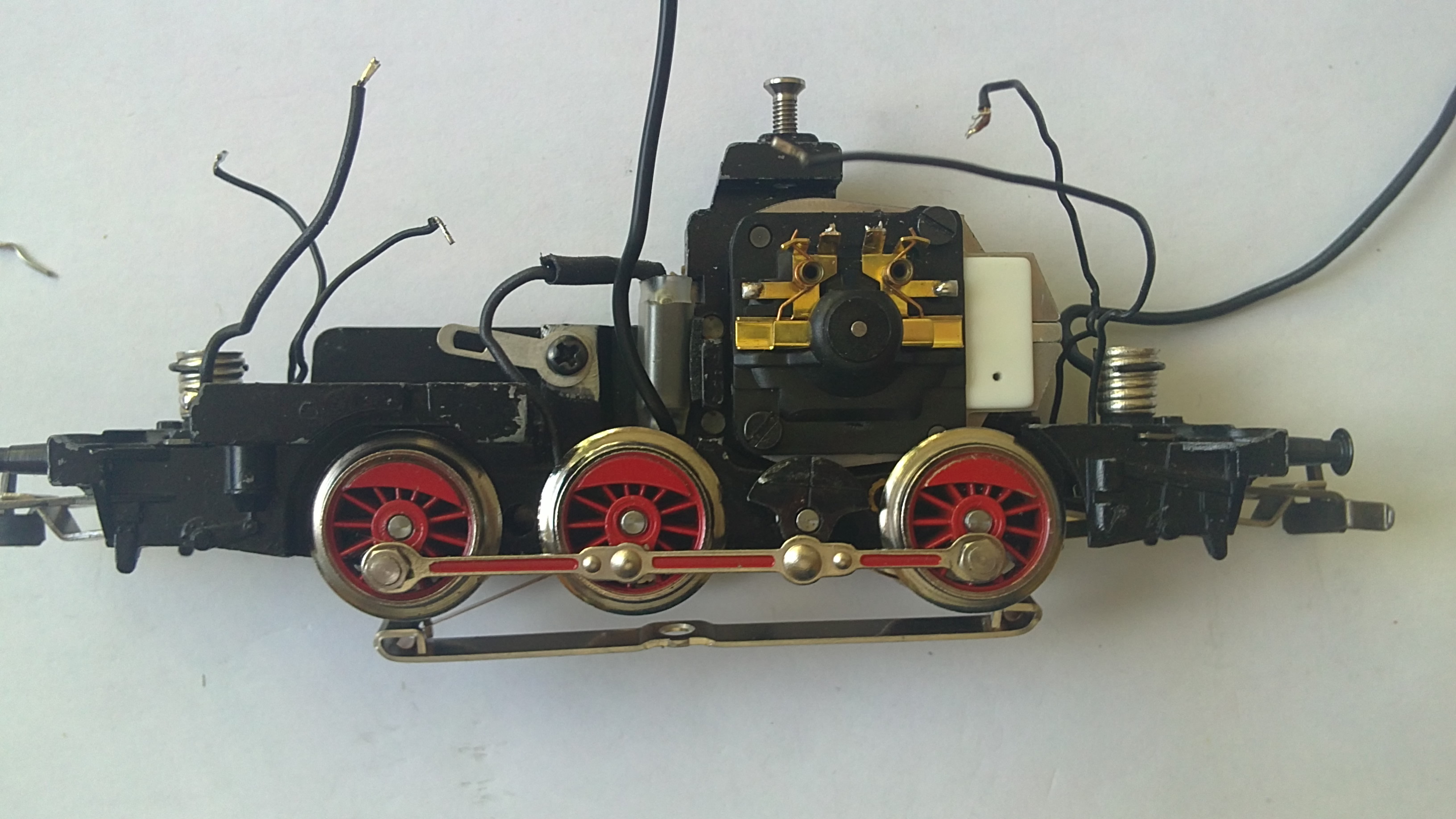
Picture showes the chassie "clean" from motor and relay, ready for intallation of the new items. Original cabels (black) for lighting and telexcouplers reused in the new installation.
All items for the new 5-pole motor before installation, with the motorbrushes, screws, armature, field magnet, bearing-plate and the two connecting components for each pole of the motor. All motor parts were separately choosen at my Märklin supplyer, to be shure that all of them, will fit at the space available for each item.
Complete new motor installed on the chassie. The screwhole earlier used for fitting of the relay, is now used for fitting of a "soldering-ear" used for connecting of the ground-pole for the power supply.
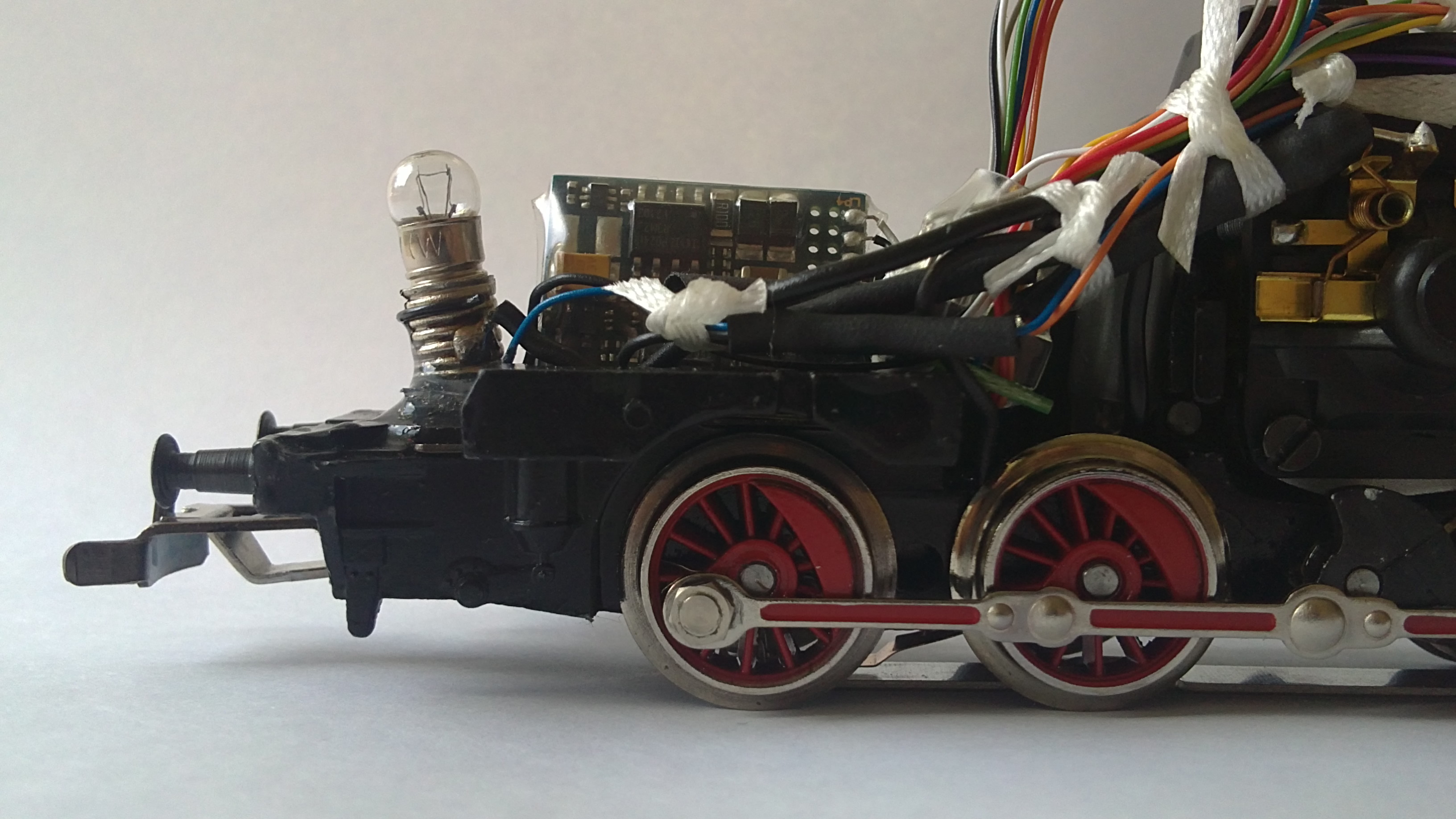
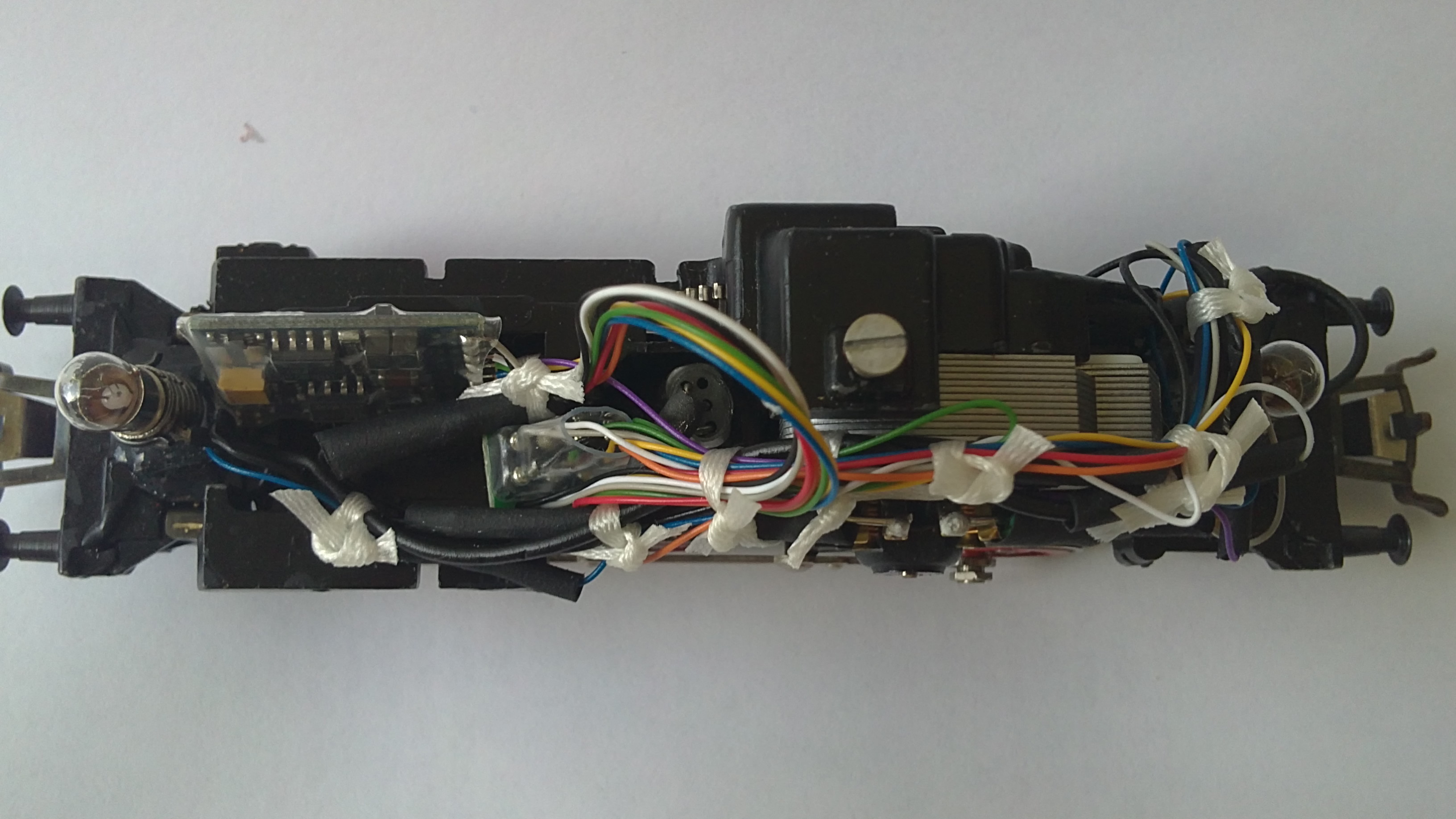
Decoder installed and cables connected according to instructions given in the ESU-booklet. For bundeling of the cables, I have used Nylon and Dacron flat braided tape, supplyed from Alpha Wire Corp N.J, USA.
Installation seen from the top. I have used the extra cable harness available from ESU, art nor 51959, fitted with an 8-pole connector, matching the one supplyed with the decoder. Easier for service of the decoder. No changes and soldering is done on the decoderunit as such. The ferrit-core seen to the left of motor, installed on the power feeder from the pickup-shoe, was later removed, to be able to make decoder-programming direct on track.
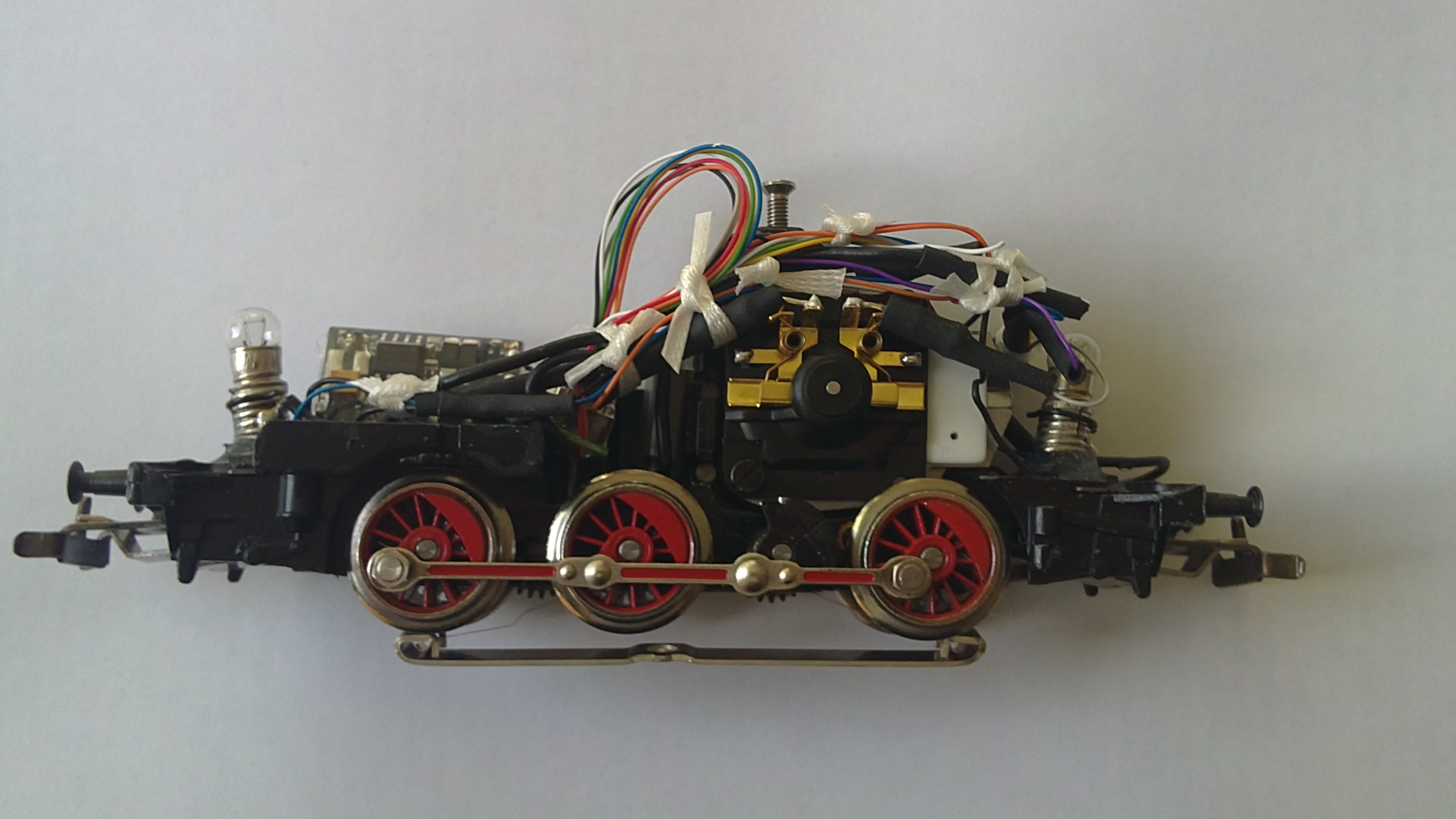
Pay a little extra attention to the cables passing by the motorunit, so the top can be reinstalled without any problems. On of the driving wheels whas changed to one without traction tires, to obtain maximum connection for the zero-pole to the tracks. Also silvergrase whas used to lubricate the axels, for the same reason. FINAL ADJUSTMENTS FOR THE MOTOR: A final adjustment of the decoder was done, to fit the Märklin High performance 5-pole motor according to the ESU booklet. Special attention was taken to the s.c. K (CV54) and I (CV 55) parameters. My motor-CV:s was adjusted as follows: CV2:3, CV52:32, CV53:120, CV54: 60, CV55: 95 and CV 56: 255. To obtain maxumum erarthing for the digital functions, it was necessary to remove one of the mail wheels, equipped with a rubber ring for slip protection, for a wheel totally in metal. Everything now works excellent, with very nice speed caracteristics.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}